
INTRODUCTION
UVOD
Turkey has 22.7 million ha of close to nature forest area covering nearly 27% of its total land. Approximately 46% of the total area is on steep terrain with ground slopes greater than 40%. Hence, harvesting in mountainous regions has always played a significant role. (GDF, 2013). Forestry operations in Turkey are carried out at different parts of the country under different conditions. Only the best forest road networks can provide conditions for working in wide, scattered and difficult mountainous areas. Approximately 18 million m³ logs are transported via forest roads in Turkey, each year (GDF, 2013). Forest road networks were developed via manual methods in previous studies, while computer software and hardware have been used extensively and effectively for solving complex problems in forest areas, especially in developed countries (Akay 2003; Rogers 2005;Demir 2007) in recent years. Nowadays, concepts such as digital map, GIS and land information systems have gained importance in the design of road networks (Akay, 2003;Aruga, 2005;Gümüş, 2008;Çalışkan, 2013).
Timber harvesting, as a succession of interrelated and interdependent operations in timber production, includes tree conversion (felling and processing) and timber transport. Timber transport consists of two mutually dependent sub-phases: off-road (timber extraction or primary transsport) and on-road (further transport or secondary forest road network) (Bayoğlu, 1962;Seçkin, 1978;Conway, 1982;FAO, 1982;Erdaş, 1986;Haarlaa and Jurvelius, 1987;Acar, 1994;Berg and Schiess, 1996;Dykstra and Heinrich, 1996;Heinimann, 1999;Karaman, 2001;Rummer, 2002;Heinimann and Stampfer, 2003;Pentek et al., 2008). In recent studies,Abbas et al., (2014) analyzed the different operational matters, conditions, equipment and transportation use reported by logging firms. The study provided technical forest product operations, information and methods for assessing the capacity of logging firms and markets looking to expand their businesses.Visser and Stampfer (2015) reviewed developments, the main engineering considerations of cable-assist workings, as well as the advances in integrating equipment into harvesting systems. They also analyzed the operating guidelines that are either in use or being developed to help implement the timber extraction systems. Duka et al., (2016) concluded that extending the operating range of skidder on steeper slopes with heavier loads has the potential to decrease harvesting costs and increase productivity.
There are four principal means of off-road transportation: ground vehicles on natural terrain, ground vehicles on skid roads, carriages on cable structures and airships in the air (Heinimann, 1999). The necessity of the timber raw material in Turkey has been increasing (GDF, 2013). Transportation stage involves a rather difficult, expensive and time consuming activity in timber production activities. In this process, transport of forest yield from forest to the landing has been practiced in various forms. In particular, transporting forest yield with minimum loss in quality and quantity and with minimum damage to the environment seems to be an important problem to be solved.
Timber transportation on ground surfaces in forest lands causes erosion on soil, damage on saplings and leads to loss of quality and quantity on stand trees (Lubello, 2008). This is especially a problem that we are faced with when losses of forest value, particularly in mountainous regions are taken into consideration. GIS for assessing soil trafficability was initially deployed for military off-road planning after which these applications were introduced to forest and agricultural applications (Lubello, 2008). In some cases, terrain evaluation has been carried out based on economic considerations in order to optimize road models regarding financial values.Lubello (2008) suggested a rule-based spatial decision support system for planning of forest operations using GIS techniques.
Suvinen (2006) used a GIS-based simulation model to evaluate the interaction of terrain trafficability, vehicle mobility and terrain tractability that takes place through the machine wheel’s surface.Mohtashami (2011) conducted a case study in Sweden putting forward that the use of digital planning of the improvement of strip roads in order to avoid vulnerable terrains made forwarding of timber more profitable.
Forest harvesting operations are usually pursued either by the General Directorate of Forestry or the private sector. However, there is no standard for specific terrain or forest road network conditions; therefore the selection of a specific harvesting operation has been limited to the availability of machineries and worker force.
Thus, the first objective of this study was to investigate the secondary forest road network with regard to forest road density, forest road spacing and to implement developed planning approach using Geographic Information Systems (GIS) in Anbardağ planning unit of Giresun Forest Enterprise, Turkey. Another important objective was to develop a model for timber extraction systems via GIS analysis taking into consideration the terrain morphology and secondary forest road network.
MATERIAL AND METHODS
MATERIJAL I METODE
Study area- Promatrano područje
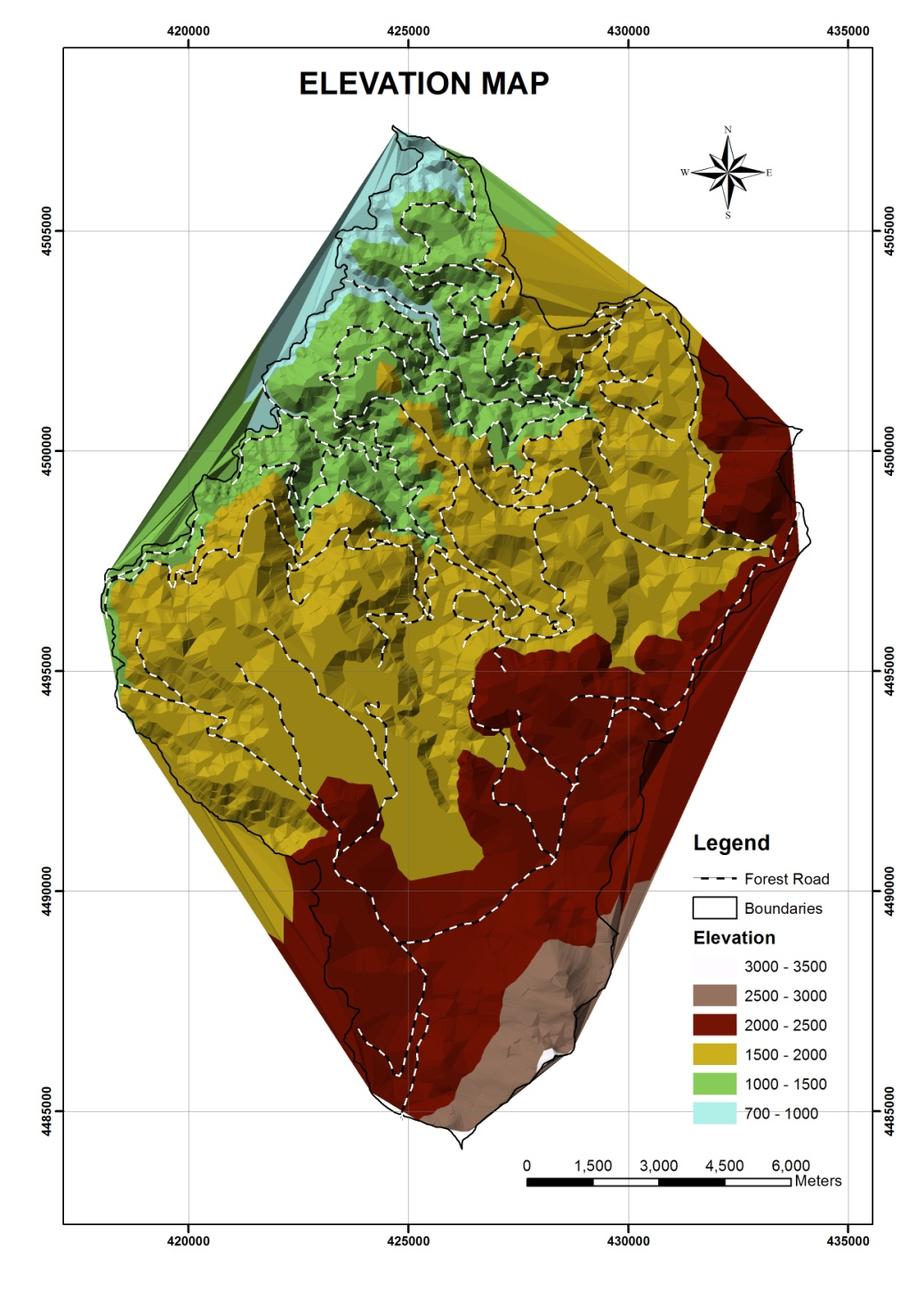
This study was carried out in the Anbardağ forest planning unit covering an area of approximately 5975.0 ha in the Giresun province in the northeastern Black Sea region of Turkey. The area was located between 400 42' 47" - 400 30' 13" North, and 380 01' 49" - 380 13' 16" East. The relief has a very irregular topography, and the elevation ranges from 700 to 3100 m. The mean annual precipitation is 1297 mm, with the lowest values being recorded in July and August. Dominant tree species used for production purposes are natural oriental spruce (Picea orientalis Link.) and oriental beech (Fagus orientalis Lipsky). Traditionally, cut-to-length harvesting method has been used in Turkish forestry. While skidding depends on the steep slope and presence of adequate road infrastructures, felling and delimbing operations were used to be carried out via chainsaws, . Debarking with axe and/or log wizard is mostly operated in stands and rarely on roadside (Eker and Acar, 2006). Agricultural and forest tractors are mostly represented as off-road machines and have been widely used. Aerial yarding is carried out by means of cable cranes based on sledge winch yarder and mobile tower yarder. Loading operations at the roadside or landing is carried out manually with grapple loaders or hydraulic cranes. Hauling through forest roads and main roads is executed by truck and tractor trailer from roadside to the main storage site.
Methods-Metode
Geographic data used in this study were acquired from on-screen digitized paper maps in an ArcGISenvironment. These maps consist of topographical maps containing elevation data (10 m contour interval), forest management plan information, forest road network, administrative boundaries, hydrology network and technical limitations for timber extraction systems. Topographic vector maps of 1:25000 scale were used in this study. These maps were produced by the General Command of Mapping of Turkey using Universal Transvers Mercator (UTM) projection and ED-50 datum. Therefore, the original projected coordinate system, UTM, European Datum 1950, Zone 37N, was selected for all maps.
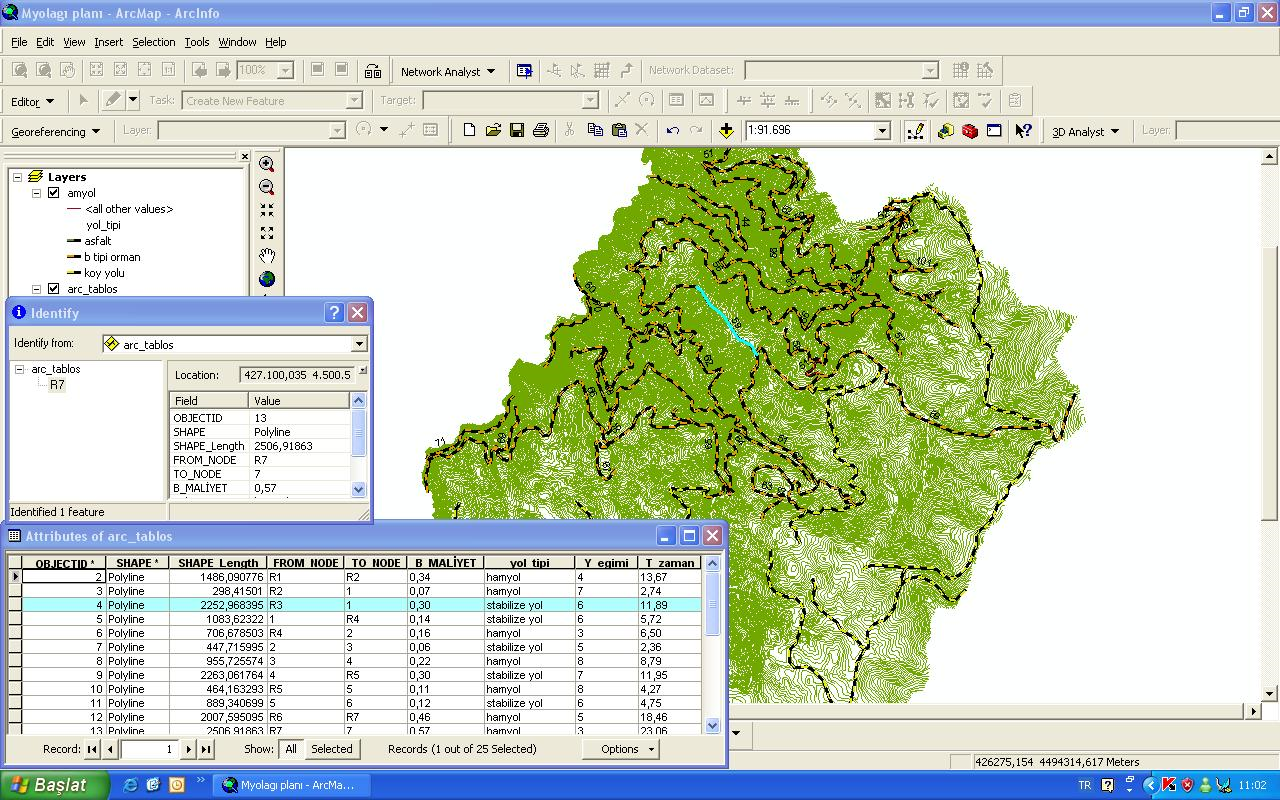
An inventory of forest roads not existing in the digitized maps was conducted using GPS (Global Positioning System). Road routes were also collected with track mode of GPS. GPS data were converted into a GIS format using Pathfinder Office software. Field descriptions of continuous segments and discrete features were added to GPS location information to create a series of GIS coverages. A separate data layer (coverage) was made of each road feature mapped. The created layer was then used to calculate forest road density, road spacing and road coverage. Road density was obtained using the formula (1), road spacing was determined theoretically using the formula (2) and road coverage was calculated according to formula (3) as followsBackmund (1968):
RD=road length (m)/district area (ha) (1)
RS=10000/RD (2)
in which RD was Road Density and RS was Road Spacing.
Road coverage: (Accessible areas for logging)/ total areas*100 (3)
Timber extraction systems were determined on the basis of the following: ground slope, extraction direction, extraction distance, forest road network, elevation and boundaries. The Digital Elevation Model (DEM) of the study area was created with ArcGIS 10.0 software. Ground slope, aspect, and elevation maps were derived from the DEM.
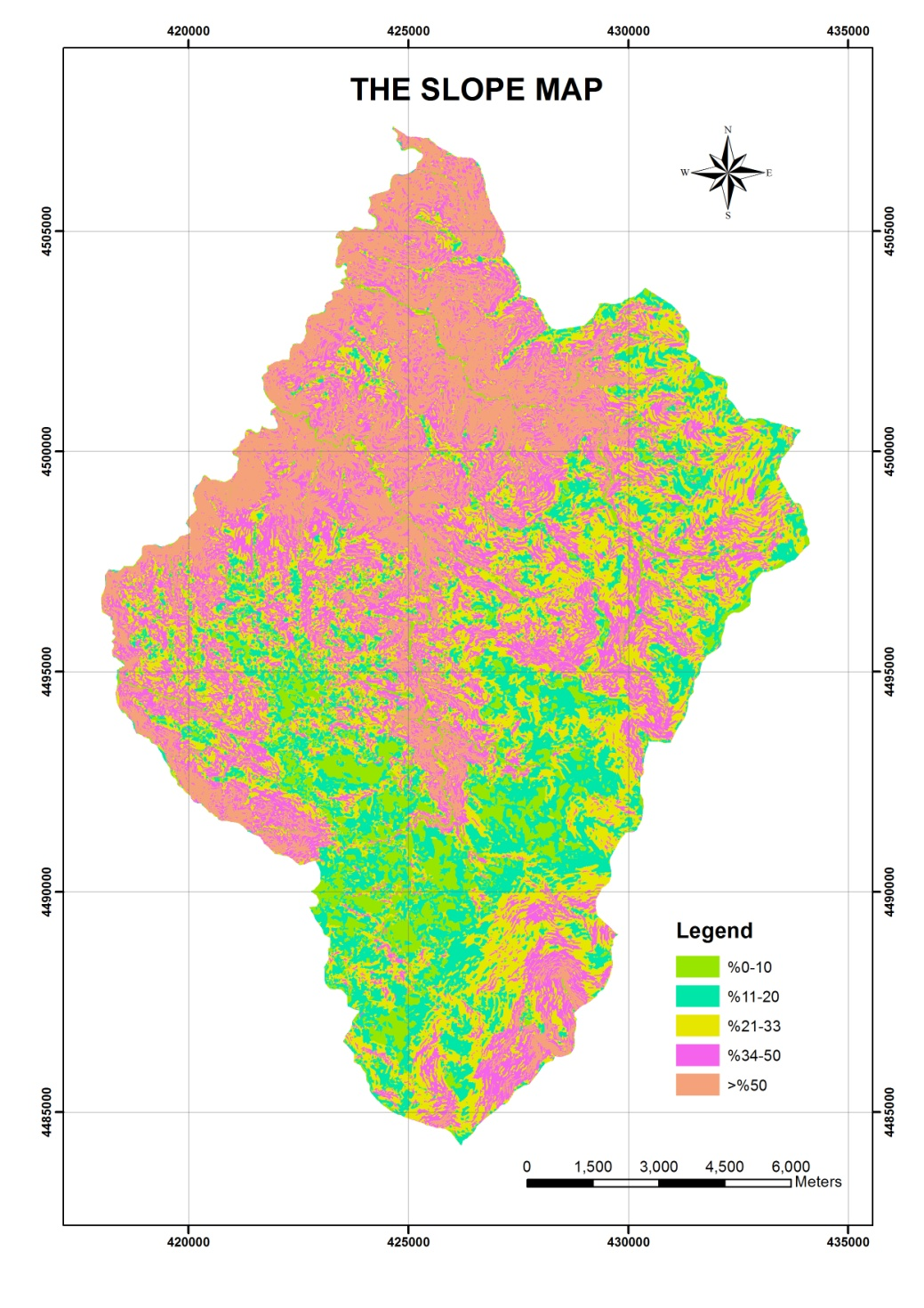
Ground slope is one of the most important parameters determining the choice of an extraction system. Ground slope was calculated using the slope tool of the Spatial Analyst toolbox. Five main slope classes (in percentage) were defined according toSamset (1979) (Table 1).
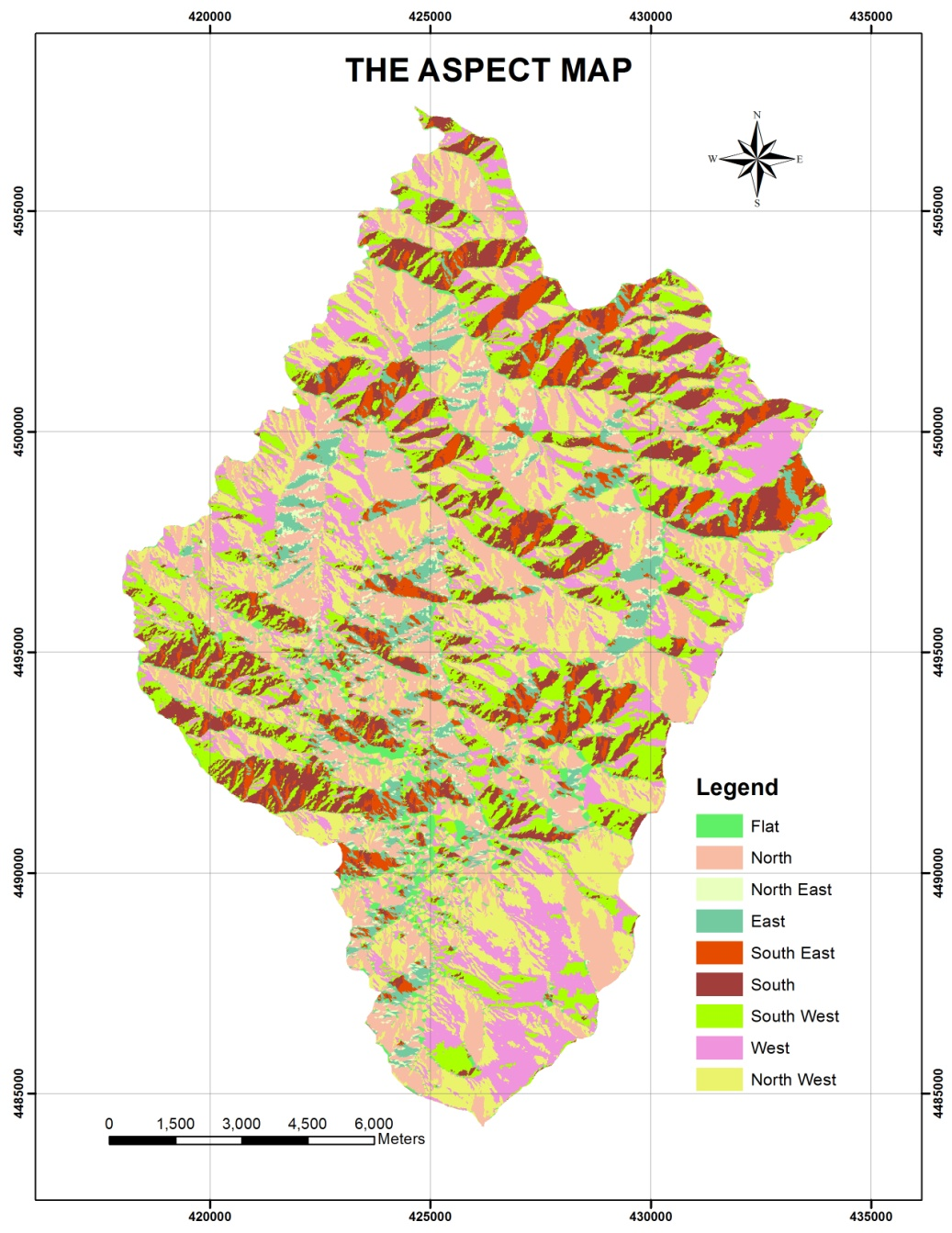
Aspect associated parameters such as exposure to sunlight; drying winds and rainfall are important factors in forest roads. Slope direction map of the study area was divided into 9 directions including flat, north, northeast, east, south, southeast, southwest, west and northwest.
The mean extraction distance (off-road transportation defined as the average distance between stem-site and the next forest road or storage place for further transportation, was grouped into five classes as follows: Class 1, <100 m; Class 2, 100–250 m; Class 3, 250–500 m; Class 4, 500–1000 m; Class 5, >1000 m. The extraction distance was generated via “Euclidean Distance Tool” using the roads shapefile (Tucek and Pacola 1999;Lubello, 2008). Although the maximum distance may be changed according to user, it was set up to 1000 m. as default.
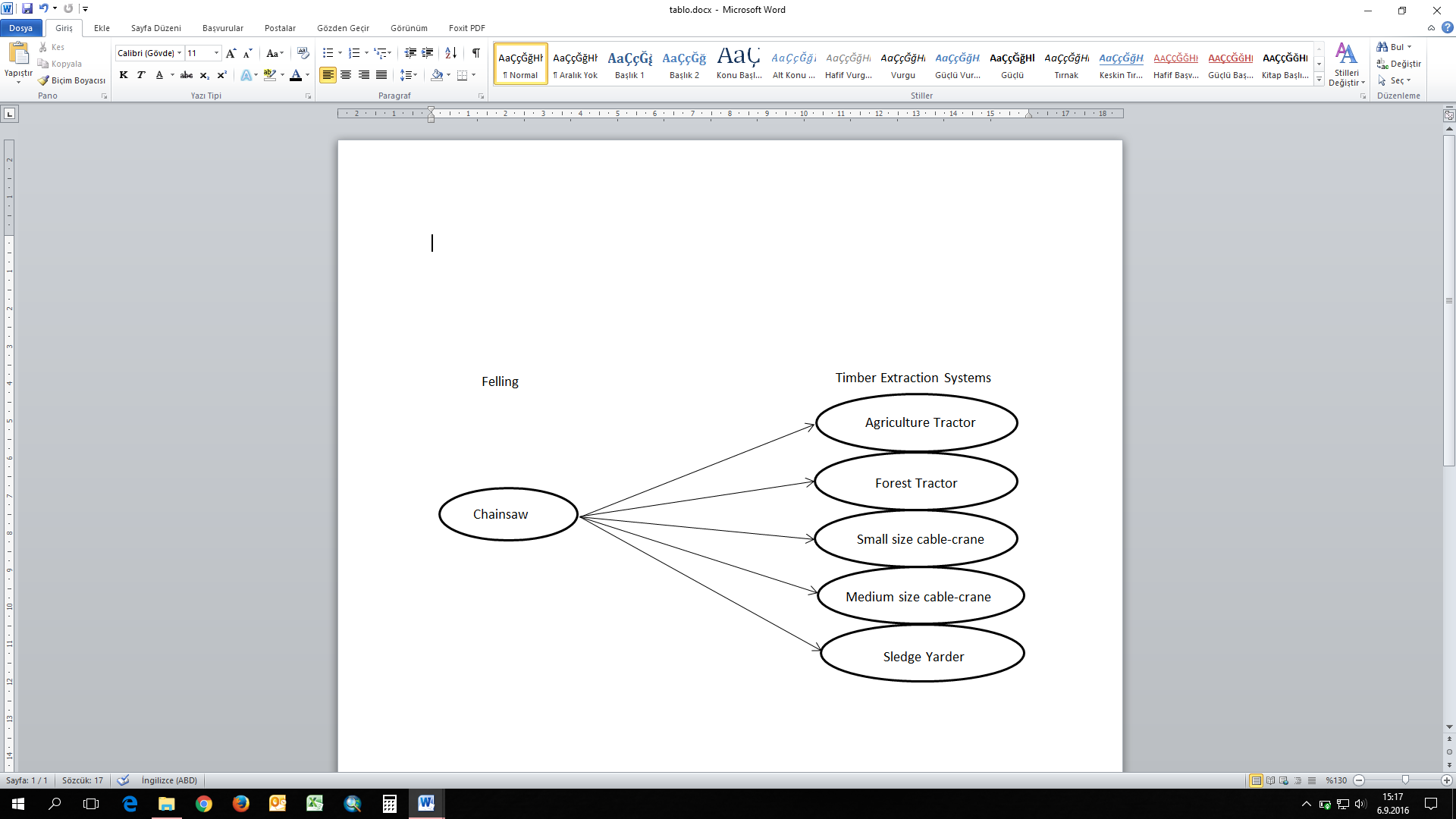
Five main harvesting systems were selected for harvesting operations in the researched area considering timber extraction systems and felling method (Figure 1). Some factors such as working direction, ground slope limits, operation distance were found to be different according to the selected system. Therefore, to determine the timber extraction systems, studies previously conducted were used (Aykut et al. 1997;Acar 1997;Acar 1998;Çağlar 2002;Öztürk and Şentürk 2006;Şentürk et al. 2007) (Table 2).
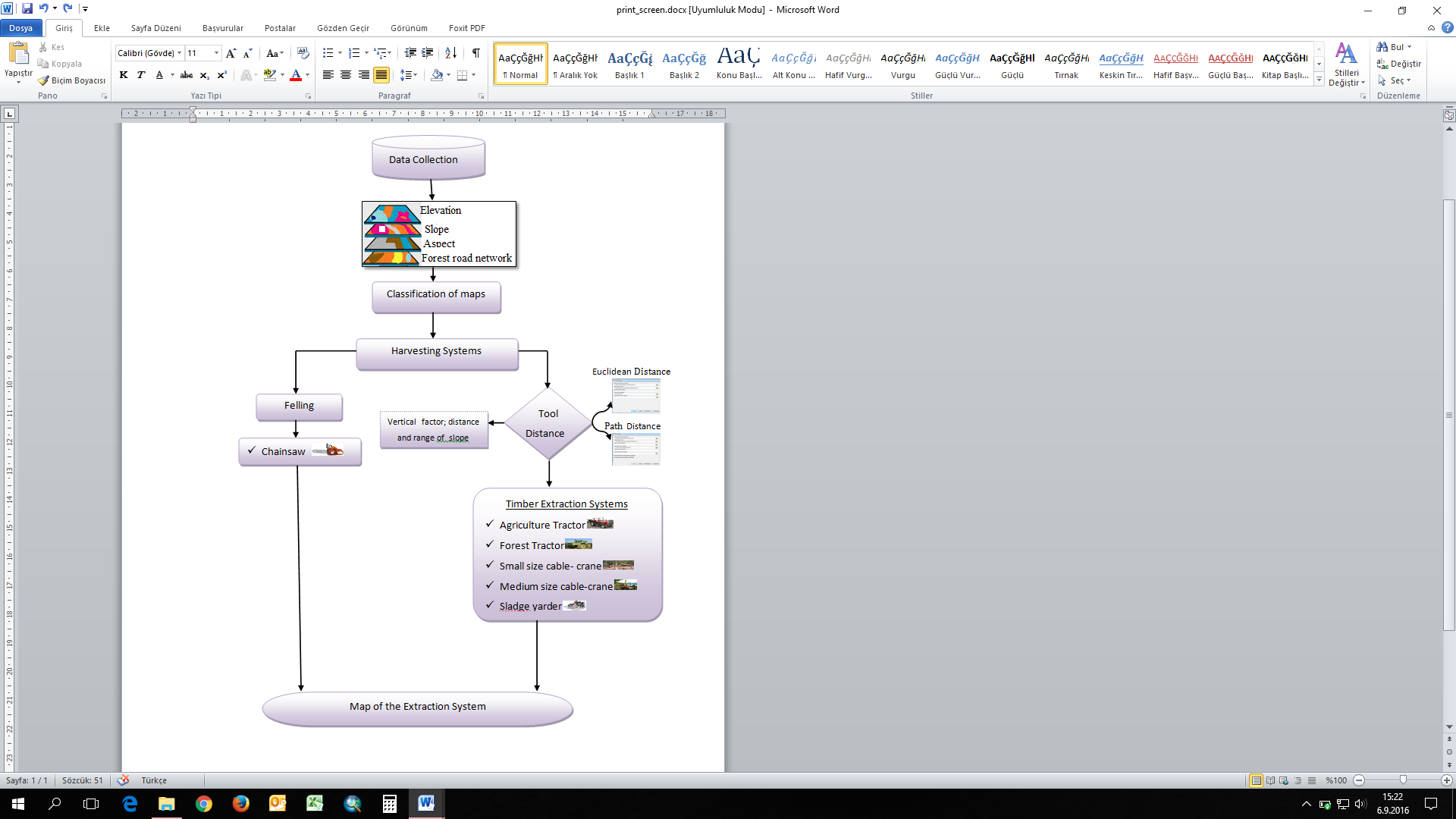
The “Euclidean Distance” and “Path Distance” commands were used in order to calculate the extraction distances and the relative limit of the terrain condition. The Path Distance tool is one of the available tools in ArcGIS 10.0, as part of Spatial Analyst, performing cost distance analysis, accounted for both horizontal and vertical cost factors as well as true surface distance. Vertical factors determine the difficulty of moving from one cell to another, while accounting for the vertical elements that may affect the movement (Pellegrini, 2012;ESRI, 2013). The vertical factor parameters in the model were set as values of terrain slope according to the relative limits to determine the timber extraction system. The Path distance analysis was performed for each extraction system. Each output map was then reclassified according to the feasibility of each system. The five output maps were then unified to create the final map representing the extraction system. The graphical representation of workflow was given inFigure 2 to show our methods for combining all the information.
RESULT AND DISCUSSION
REZULTATI I RASPRAVA
As mentioned above, topographic factors are very important for secondary forest roads. The research area generally has a steep topography. Infigure 3 the Digital Terrain Model (DTM) of the study area is represented.
Given the mainly steep terrain slope classes 3, 4 and 5 (74.44%) predominated with the total area of 19269.74 ha, while the slope class 1 had the lowest cover according to the slope map of the study area (Table 3,Figure 4). When the roads are constructed in mountainous terrain, the excavated materials from the hillside are widely scattered downward the slope (Kim et al. 2004;Hosseini et al., 2012). Properly locating a road depends on the type of road, geology, land use, hydrological network and the side slope of the ground. Evaluating the needs of forest roads of an area is fundamental to evaluate together with the accessibility of the forest and also the possibility to perform the silvicultural operations (Pellegrini, 2012). The clearing limit of roads and skid trails will vary, depending on ground slope and the amount of cut and fill required (Kramer, 2001). Ground slope is the most significant parameter influencing the off-road transportation (timber extraction) and consequently the choice of the extraction system. Therefore, we considered technical limits as pertable 2, to select the appropriate extraction systems generally limited by distance from the road.
Aspect associated parameters such as exposure to sunlight; drying winds and rainfall are important factors in forest road and timber extraction systems. A road along the slope which gets the most sun will dry out faster after rainfall. Consequently, it will be subject to less damage from traffic thereby resulting in lower maintenance cost (Sessions 2007;Hosseini et al., 2012). Therefore, we prepared an aspect map and displayed that all aspects were presented in the study area (Figure 5). The largest areas of aspect are northwest, west and southwest directions, while the smallest areas are flat (Table 4).
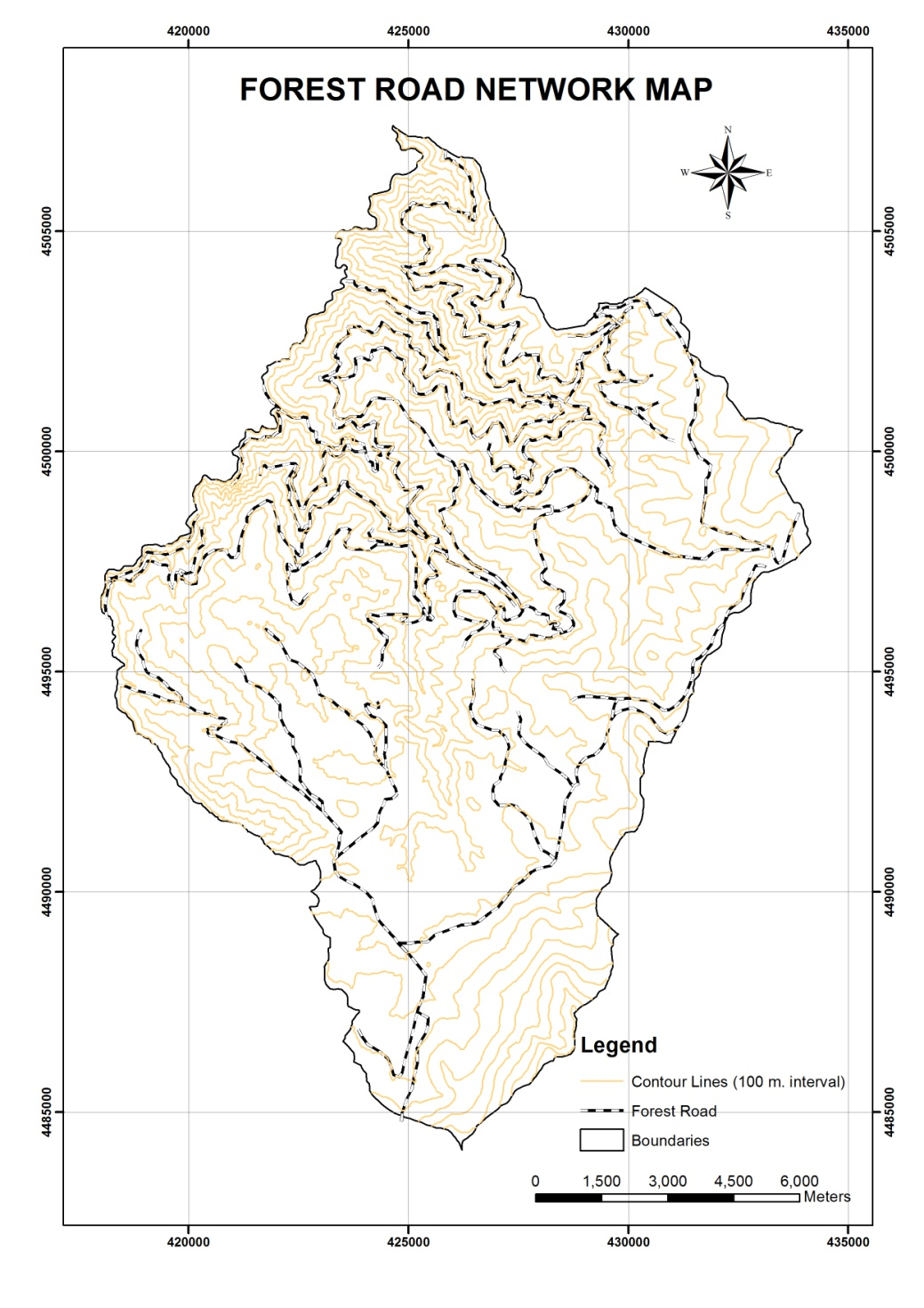
Existing forest roads were digitized and a database was built using GIS as shown inFigure 6. One major challenge in secondary road network planning is to determine timber extraction systems under different terrain conditions. Ground slope and topography which affect the forest road network were considered as correction factors according toSegebaden (1964) andLotfalian (2011).Heinimann (1998) reported that road spacing on slopes depends on the underlying off-road transportation technology. Considering the mentioned literature, road length, density, spacing and coverage were calculated as 226.34 km, 11,74 m/ha, 851,7 m, and 51% respectively for the entire study area. 184 km of the existing roads have a longitudinal slope greater than 10% and 42 km have a long slope greater than 12%. (Figure 7).
Timber extraction systems were determined on the basis of ground slope, extraction direction, extraction distance, forest road network, elevation and boundaries. Spatial location of five selected systems as; chainsaw-agriculture tractor, chainsaw-forest tractor, chainsaw-small size cable crane, chainsaw-medium size cable crane and chainsaw- sledge yarder are shown infigure 8 according to our model considering above mentioned parameters and influencing factors such as technical limits of felling and timber extraction.
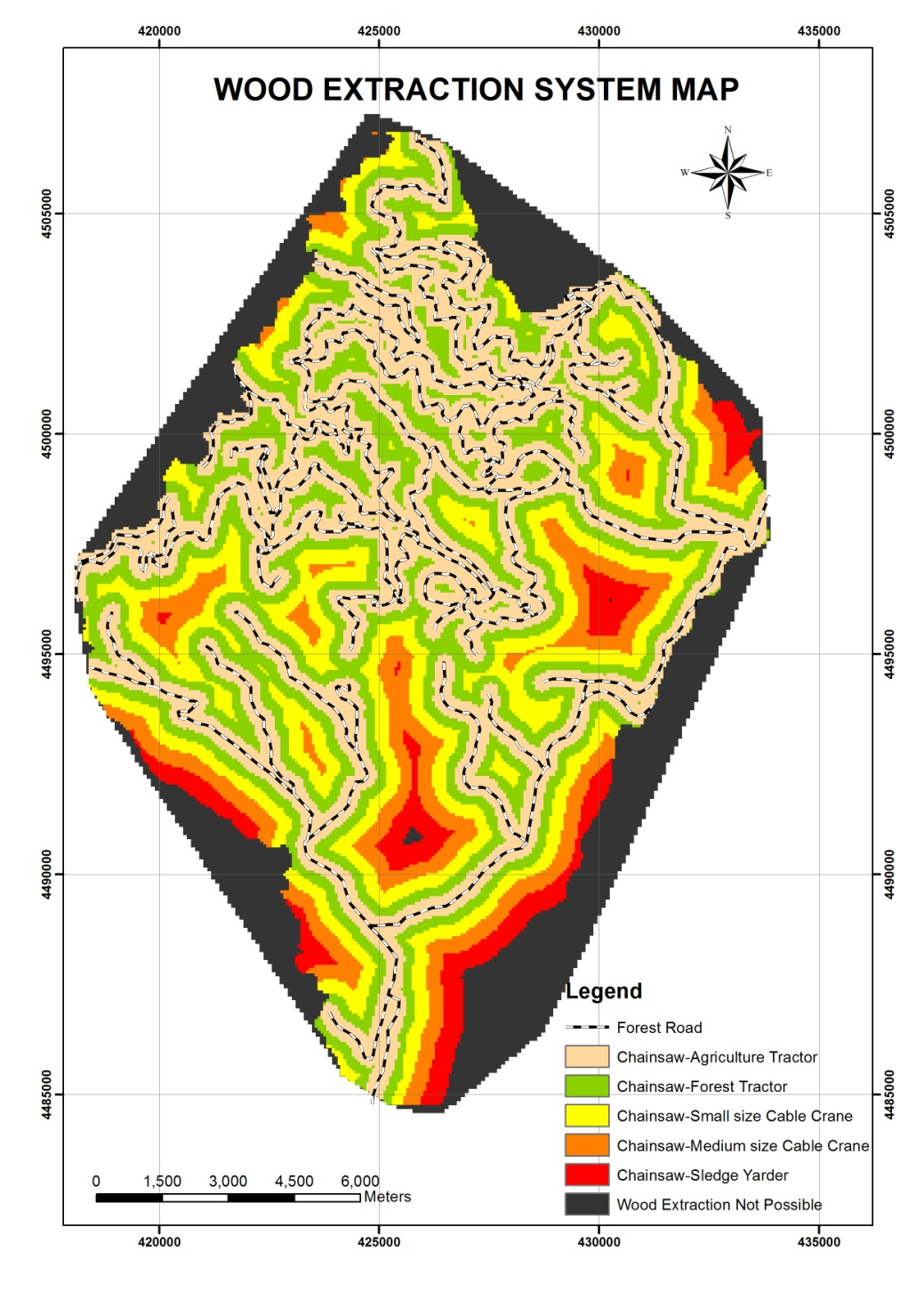
Outputs of the developed model displayed that, chainsaw–small size cable crane (36.76%) and chainsaw–medium size cable crane (27.94%) systems covered the largest forest area followed by chainsaw–forest tractor (23.52%), chainsaw–agriculture tractor (10.29%) and chainsaw–sledge yarder (1.49%). The model presented in the paper was developed as a tool for planning forest operations.
There is no recorded study in the literature about determining timber extraction system considering five different systems. There are some studies exist, however they generally focus on one system and basically analyses the cost or efficiency of the selected method or the system. Therefore, the outputs of the conducted study couldn’t compare with similar studies. On the other hand, a few studies conducted for the allocation of timber extraction systems but under different conditions. For instance,Pentek et al., (2008) developed a model for selecting a harvesting system for commercial forests of Northern Velebitis based on three influencing factors: terrain slope, extraction distance and breast height diameter of trees. Based on the model, a harvesting system is determined for each forest sub compartment. The results show that breast height tree diameter restricts mechanized felling and processing. They found that considering the fully mechanized nine harvesting systems, only over 7.27% of the researched area could be used.
CONCLUSIONS
ZAKLJUČCI
The results of this study put forth that GIS is one of the most valuable tools in locating and analyzing mountainous areas for forest road network planning and model for timber extraction system.
The maps of elevation, slope, aspect, forest road network and timber extraction were prepared and classified. In this study the total length of existing forest road network was 226,34 km, road density was 11,74 m/ha, road spacing was 851,7 m and road coverage was 51% . The GIS based timber extraction model, presented in this paper, has been developed for planning in harvesting operations. The timber extraction systems were determined on the basis of factors, such as slope, extraction direction extraction distance, existing forest road network, elevation and boundaries. While the forest road network allows access to the forest area, the system of timber extraction can be considered as the technical limit which defines the part of forest that can be managed with the present roads. The model selected timber extraction systems as; steep terrain chainsaw–small size cable crane (36.76%) and chainsaw–medium size cable crane (27.94%) for the study area.
In conclusion, options for more economically and environmentally friendly timber raw material production planning became more evident for the planners. The results showed that wecould provide an integrated harvesting operation solutions for a characteristic mountainous area in Turkey based on GIS techniques.
The methodology developed for this study can also easily be applied to the other planning units as long as the requirements are met such as digitized contours, existing roads and boundaries.