
Uvod
Potražnja za hranom i prehrambenim proizvodima u posljednjim desetljećima zahtjeva veliku odnosno maksimalnu produktivnost poljoprivredne proizvodnje. U danim uvjetima te korištenjem modernih tehnologija uočava se stalno i pretjerano korištenje sredstava za zaštitu bilja (SZB) (Huffaker, 1977). Cho i sur., (1999) navode kako je upotreba pesticida sastavni dio poljoprivrede, dok se gubici usjeva koji su između 30 i 35 % mogu spriječiti kada se eliminiraju štetni insekti i bolesti upotrebom pesticida. Iako su pesticidi neophodni u modernoj poljoprivredi otrovni su i opasni za ljude (Rogan i sur., 2005; Dasgupta i sur., 2007) i za okoliš (Pimentel i sur., 1993; Reus i sur., 2002). Ivanek Martinčić (2022) navodi kako pravilna primjena agrotehničkih mjera može znatno smanjiti potrebu za primjenom kemijskih mjera zaštite bilja. Tadić (2013) navodi kako je poljoprivreda neodvojivi dio globalnog ekološkog sistema, u kojem su ljudi, životinje, biljke, klimatski faktori i poljoprivredni inženjering u interakciji. Autor navodi kako je nužno postići cilj u obliku inovacija, poboljšanja ili razvoj novi tehnički rješenja upotrebom senzora za preciznu zaštitu bilja, prskalica sa povratnim sistemom, poboljšana zračna podrška prskalice ili orošivača. Salyani i sur. (2007) navode kako je automatizacija rada prskalica signifikantno i direktno utječe na efikasnost, uštedu i zaštitu životne sredine. U današnje vrijeme brojni proizvođači nude širok raspon mlaznica s ručnim podešavanjem kutova aplicaranja zaštite, pa čak i automatski sustavi zaštite koji mogu kontrolirati protok (poput Spraying Systems co, PulsaJet i AutoJet). Veliku primjenu kod aplikacije zaštite bilja u zadnje vrijeme imaju roboti. Na tržištu je razvijeno je nekoliko poljoprivrednih robota za aplikaciju zaštite protiv korova (Mandow i sur., 1996; Steward i sur., 2002; Singh i sur., 2005; Pergher i sur., 2008;; Slaughter i sur., 2008; Berge i sur., 2012; Weyrich i sur., 2013; Peteinatos i sur., 2014; Guan i sur., 2015; Meng i sur., 2015; Gázquez i sur., 2016; Laursen i sur., 2016; Oberti i sur., 2016; Zhao i sur., 2016; s ciljem smanjenja upotrebe pesticida uz sprječavanje gubitaka usjeva zbog štetnika (Pérez-Ruiz i sur., 2015). O'Donoghue i sur., (2011) navode prema svojim istraživanjima kako je uvođenjem novih tehnologija u poljoprivrednu proizvodnju poput GPS-a i robota došlo do smanjenja utroška radne snage za 30 % uz istovremeno dvostruko povećanje produktivnosti. Šumanovac i sur., (2022) navode kako se razvojem robotike omogućuje poljoprivrednicima proizvodnja zdravije hrane te doprinosi razvoju poljoprivrede koja poštuje okoliš i novim tehnologijama djeluje na očuvanje tla i vodnih resursa. Berenstein i sur. (2017) navode kako je stvarna ušteda pesticida ovisna o karakteristikama algoritama detekcije i navigacije te da tek tim uređenim sustavom se postiže ekonomska izvedivost. Krstić (2012) uočava u svojim istraživanjima veliku korist primjene GIS tehnologija i sustava za preciznu poljoprivredu, gdje se pri direktnoj uporabi postiže smanjenje uporabe kemikalija te sprječavanje zagađenja, kao i znatne druge pogodnosti u odnosu na ranije tehnologije pri zaštiti bilja. Maceljski (2000) navodi kako precizna zaštita bilja nastoji omogućiti mjere zaštite bilja i to na način da ista bude optimalna svakoj pojedinačnoj biljci, a ne samo prosjeku svih biljaka u polju. Precizna zaštita bilja mora težiti i izbjegavanju primjene nekoga sredstva za zaštitu bilja tamo gdje nije potrebno, sniženju troškova i smanjenju onečišćenja okoliša. Šćepanović i sur. (2018) navode kako je glavni pokretač koncepta precizne zaštite bilja spoznaja o potencijalnim negativnim nuspojavama poljoprivrede na zdravlje ljudi, životinja i okoliš. Isti autori ukazuju kako se doskora smanjenje uporabe pesticida (herbicida) uglavnom oslanjalo ili na redukciju količine pesticida ili na istovremenu primjenu pesticida i neke druge mjere u suzbijanju korovnih vrsta, najčešće mehaničkog suzbijanja. Međutim, najnovijim trendovima u području suzbijanja korova razvijaju se tzv. „pametni strojevi“ sa senzorima za detekciju korova s kojima se može čak potpuno izbjeći primjenu pesticida. Šumanovac i sur. (2021) navode kako je glavni cilj precizne zaštite bilja uspostava biljne proizvodnje sa što manjim utroškom kemijskih sredstava, uz optimizaciju svih ulaznih resursa te zadržavanje visokih prinosa. Jurišić i sur., (2015) navode kako suvremene tehnologije i izumi, kao što su globalni pozicijski sustavi i GIS alati, daju veliku prednost u boljoj i učinkovitijoj zaštiti bilja. Također još jedan od suvremenih načina regulacije količine sredstava za zaštitu bilja (SZB) je upotrebom senzora, odnosno unaprjeđenjem konvencionalnih sustava zaštite bilja sa senzorskim sustavom (Jeon i sur., 2012; Pozder i sur., 2018; Solanelles i sur., 2006). LIDAR je danas jedna od najmodernijih tehnologija koja se koristi u promjeru i izradi topografskih planova i karata za različite namjene, te se u zadnje vrijeme često koristi i u zaštiti bilja. Llorens i sur. (2021) navode LIDAR senzori ostvaruju veću točnost i detaljnije informacije o obliku krošnje. Vrlo su pogodni za uporabu na većim udaljenostima jer imaju visoku prostornu razlučivost i brzinu detekcije
Automatski uređaji za reguliranje rada prskalice
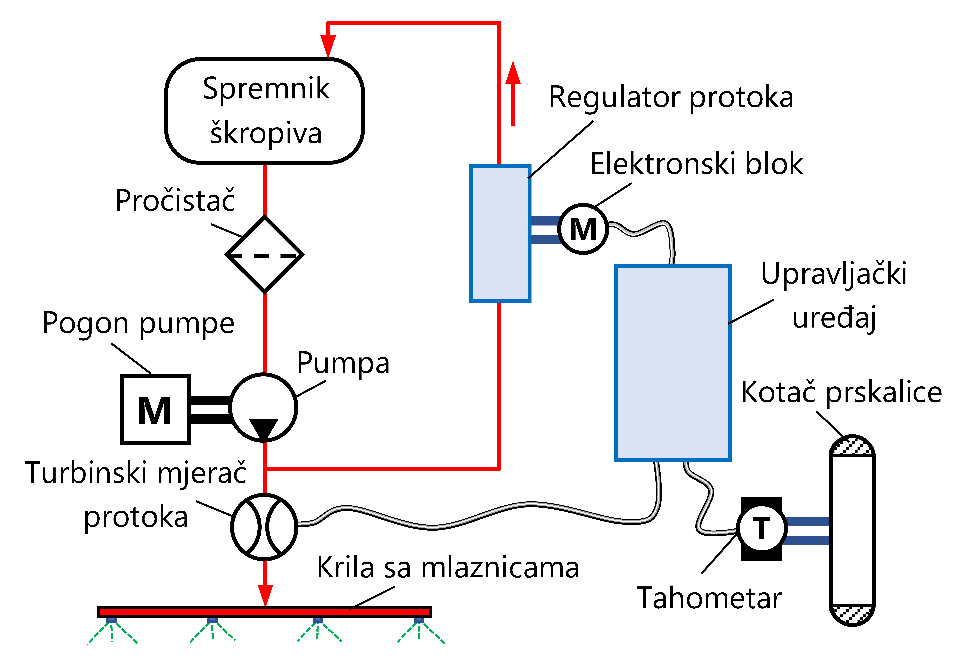
Osnovna karakteristika ovih uređaja je precizno reguliranje zadanih veličina u radu prskalicom. Oni omogućuju kvalitetno i učinkovito tretiranje bez obzira na promjenu radne brzine agregata, olakšavaju rad rukovatelju pri tretiranju i omogućuju ravnomjernu distribuciju tekućine, te smanjuju nepotrebno zagađenje okoliša. Na suvremenim se prskalicama nalaze elektronski kontrolni sustavi koji imaju osnovne parametre kao što su: radna brzina agregata i protok tekućine kroz mlaznice obzirom na radni tlak (Slika 1.).

Slika 1. Shematski izgled kontrolnog sustava (Izvor: vlastita fotografija)
Figure 1. Schematic layout of the control system (Source: own photo)
Suvremene prskalice su opremljene elektronskim regulatorom (Slika 2.) za različite sustave. Ovi regulatori automatski reguliraju tlak, odnosno kapacitet prskalice bez obzira na radnu brzinu i uvijek izbacuje istu podešenu količinu tekućine. Ovi uređaji reguliraju kapacitet prema radu motora ili prema radnoj brzini.
Slika 2. Elektronski regulator (Izvor: vlastita fotografija)
Figure 2. Electronic regulator (Source: own photo)
Kvantometar i tahometar (Slika 3.) šalju signale u elektronski blok koji ih uspoređuje i šalje signal u regulacijski uređaj koji pokreće servo motor i tako regulira normu prskanja obzirom na radnu brzinu agregata promjenom protoka tekućine.

Slika 3.Shema uređaja „Dositron“ (Izvor: vlastita fotografija)
Figure 3. Scheme of the "Dositron" device (Source: own photo)
Automatski uređaj za reguliranje norme prskanja na slici 4. je sličan prethodnoj shemi. Ovaj uređaj se zove i uređaj s „crnom kutijom“. U stvari ova kutija je računalo u koju dolaze signali tlaka i protoka sa prskajućeg uređaja i signali radne brzine s radarskog mjerača. Signal za održavanje norme tretiranja iz računala na servo-kontrolni ventil protoka i tlaka preko kojeg se propušta određena količina tekućine od pumpe u cjevovode s mlaznicama. Za kontrolu rada ovog elektronskog sustava i prskalica nalazi se ekran na kojemu se registriraju i očitavaju ovi podaci u svezi s radom stroja.

Slika 4. Automatski uređaj za regulaciju norme prskanja (Izvor: vlastita fotografija)
Figure 4. Automatic device for regulating the spraying rate (Source: own photo)
Amazone UG 3000 Super
Amazone UG 3000 Super (Slika 5.) je vučena prskalica obujma 3.200 l s krilima radnog zahvata 28 m. Navedenu sijačicu odlikuje: velika stabilnost u radu, mala masa i kompaktna krila, crpka velikog kapaciteta te jednostavna računala za korištenje. Na prskalici je moguće podešavati širinu traga od 1,5 do 2,25 m dok je maksimalna brzina kretanja 40 km/h što omogućuje visoku eksploatacijsku učinkovitost. Najvažnija komponenta navedene prskalice je Amatron 3 – upravljačka jedinica. Amatron 3 se povezuje na Amabus sustav prskalice. Naziv Amabus odnosi se na Amazone strojeve koji imaju putno računalo i kojima se dosad upravljalo putem Amatron+. Ovo je suprotnost ISOBUS uređajima i terminalima koji ispunjavaju ISO standard i koji su također kompatibilni s drugim uređajima koji nisu Amazone i koji ispunjavaju ovaj standard. Korištenjem Amatrona 3 upravlja se i obavlja monitoring rada prskalice korištenjem GPS prijamnika. Svi važni parametri (radni zahvat, udaljenost središta prskalice od GPS antene) se prethodno podešavanju u Amatron 3. Na prskalici se nalaze elektro-ventili koji omogućuju funkcioniranje prskalice, rad svake mlaznice zasebno uz pomoć električne struje. Kada se uključi prskalica Amatron 3 (Slika 6.) označava proizvodnu površinu na kojoj je apliciranje obavljeno. Kada dođe do zone preklapanja upravljačka jedinica isključuje mlaznice te se u stvarnome vremenu obavlja ušteda kemijskih sredstava.

Slika 5. Amazone UG 3000 Super vučena prskalica (Izvor: amazone.net/en/products-digital-solutions/)
Figure 5. Amazone UG 3000 Super Trailed Sprayer (Source: amazone.net/en/products-digital-solutions/)

Slika 6. Amazone Amatron 3 (Izvor: amazone.net/en/products-digital-solutions/)
Figure 6. Amazone Amatron 3 (Source: amazone.net/en/products-digital-solutions/)
Elektro-ventili su od esencijalne važnosti kod suvremenih prskalica ovakvog tipa. Jedan od poznatijih proizvođača elektro-ventila je australska tvrtka Arag sa svojim elektro-ventilom Orion WR (Slika 7.). Orion WR je sustav koji omogućuje mjerenje vrlo širokog raspona protoke ujedno i strojevi koji za raspršivanje zahtijevaju mjerenje protoka cijele armature kao jedne mlaznice. Sustav se sastoji od preklopnog ventila i dva elektromagnetska mjerača protoka s mjernim rasponima (npr. 0,5-10 l/min i 10-200 l/min). Na slici 8. prikazane su komponente ssitema automatskog podešavanja norme apliciranja. Integrirana elektronika detektira protok i aktivira ventil za odabir odgovarajućeg kanala za protok koji se mjeri. Za preciznu i kvalitetnu raspodjelu kemijskog sredstva Arag proizvodi brojne senzore, od kojih su značajniji: BLC sustav za fiksnu geometriju odnosno niveliranje strana, BLC sustav za varijabilnu geometriju, Visio TTC za kontrolu smjera poteznice/osovine (Slika 9.).

Slika 7. Orion mjerač protoka širokog raspona (Izvor: https://www.aragnet.com/IT/INT/246/Prodotti/?PRD=135368)
Figure 7. Orion Wide Range Flowmeter (Source: https://www.aragnet.com/IT/INT/246/Prodotti/?PRD=135368)

Slika 8. Komponente sistema automatskog podešavanja norme aplikacije (Izvor: Rajko i sur., 2017)
Figure 8. Components of the application norm automatic adjustment system (Source: Rajko et al., 2017)
1- kontrolna upravljačka jedinica; 2 – nosač; 3 – priključak napona; 4 – antena navigacije; 61 – jedinica navigacije; 15 – razvodnik; 7 – senzor brzine; 56 – davač razine radne tekućine u spremniku; 20 – upravljačka grupa; 32 – davač tlaka; 31 –razvodnik hidraulike; 45 –pjenasti marker.
Slika 9. Arag sustavi za fiksnu (gornja) i varijabilnu nivelaciju (donja slika) (Izvor: aragnet.com/EN/INT/246/products)
Figure 9. Arag systems for fixed (top) and variable leveling (bottom image) (Source: aragnet.com/EN/INT/246/products)
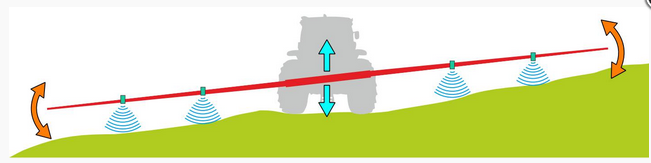
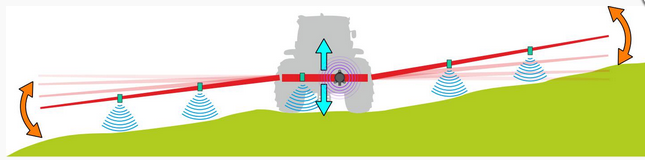
Jedan od vodećih proizvođača poljoprivredne tehnike John Deere osmislio je sustav rada sa automatskom kontrolom visine upotrebom senzora. Sustav automatskog senzora visine kraka BoomTrac Pro omogućuje: točnost i učinkovitost primjene održavanjem dosljedne visine kraka iznad usjeva, zanošenje i preskakanje mogu se znatno smanjiti, minimalizirana mogućnost kontakta armature prskalice s proizvodnom površinom što direktno dovodi do smanjenog oštećenja armature i značajno utječe na vrijeme zastoja i troškove popravka. BoomTrac Pro sustav (Slika 10.) dolazi u izvedbama s 3 ili 5 senzora.

Slika 10. John Deere BoomTrac Pro senzor (Izvor: https://www.plattevalleyequipment.com/blog-news/sprayer-performance-upgrade-kits/)
Figure 10. John Deere BoomTrac Pro sensor (Source: https://www.plattevalleyequipment.com/blog-news/sprayer-performance-upgrade-kits/)
Zaključak
Kod klasičnih prskalica koje imaju hidrauličnu dezintegraciju tekućine osnovna pozornost se pridodaje usavršavanju uređaja za: miješanje tekućine, održavanje čistoće prskalice, regulaciju radnih parametara i elemenata za oblikovanje mlaza. Poseban pravac razvoja prskalica je primjena uređaja za automatsku kontrolu norme i količine apliciranja sredstva. Usavršavanje uređaja je dostiglo razinu da se primjenjuju računala i da su povezani u mrežu GPS sustava. Norma se regulira u odnosu na: tip zemljišta, stanje usjeva, napad kukaca, zakorovljenost i napad bolesti. Aplikacija pesticida upotrebom automatske regulacije norme apliciranja direktno dovodi do značajnih poboljšanja u radu što rezultira smanjenom upotrebom kemijskih sredstava za zaštitu bilja. Korištenjem suvremenih tehnologija, senzora, GPS navigacija, LIDAR tehnologije ostvaruje se povećanje učinkovitosti aplikacije sredstava, ekonomičnost proizvodnje i smanjenje rizika utjecaja na okoliš.