
INTRODUCTION AND BACKGROUND
More than few decades scientists of various specialisations have been intensively explored the issues concerning the musculoskeletal systems (including low back or even more precise low back – pelvic girdle) biomechanics, capabilities and functionality. This is also often considering as human motion motor, responsible for controlled and purposeful motion necessary to complete assigned activity. Of course, since the occurrence of musculoskeletal conditions – disorders has become recognized as very serious and frequent problem, focus has been also put on investigating causality and prevention of pain, injuries and any other human motor disorders manifestation. Thus, purpose of research conducted are oriented and vary from health preservation and disorders prevention recommendations, to injuries management and treatment including surgery interventions (implants, prostheses, and any other that applies). In extent of this broad and general spectrum of musculoskeletal systems research activities, some research deal with sports or in general, prevailing the unimaginable human attainments and extreme human performance issues. Therefore, findings and research relevance can be divided in two main streams, but with same objective – optimal functionality of locomotor musculoskeletal system. First can contribute to healthy asymptomatic individuals to preserve that condition, or in case of some dysfunctionality occurrence to restore desired functionality, based just on proper biomechanical adjustments, therapy and synchronization. The second is the one that deal with restoration of locomotor functionality, but the causality of dysfunctionality occurred is related with unpredictable slips, falls, accidents and incidents, various pathologies (asf.) that are beyond biomechanical reasoning and understanding of complex musculoskeletal system. This paper falls within first stream since the basis for both streams is biomechanical harmonization necessity founded on proper understanding of human musculoskeletal systems that should be determined.
From the literature overview it can be identified that despite all research and professional findings and recommendations, preventative actions and standards, the occurrence of injuries and pain issues has not been significantly decreased (on the contrary, maybe are even increased), persistent and ever-present[1]. Treatment of locomotor conditions and preventative measures indicate that assigned task training may improve locomotor performance and stability[2], however not sufficiently to completely prevent disorders occurrence, showing dependence on individual skills and anthropometric predispositions. Also, disturbed biomechanical relationships – dysfunctions will also be present after the operative treatment so the prostheses will be just temporary solution[3,4]. That leads to assumption-conclusion that human body health, performance and functionality is far more complex than we already comprehend, as are the requirements of the human engagement in everyday activities. This in general indicates integration necessity of various compatible and complement disciplines, perspectives, approaches and knowledge that should be used for comprehensive, holistic findings synthesis of the identified complex biomechanical locomotor systems functionality.
Since considering previously discussed literature overview disorder manifestations in human body motor system cannot be treated as isolated, although the focal problematic point can be identified as weakest spot of the system, authors implies holistic and comprehensive behaviour of human locomotor system and functional biomechanical patterns. In many cases of lumbar or pelvic disorders they are just manifestations of other biomechanical disturbances that need to be identified. Since this region convey most of mechanical load between other active body segments involved in locomotor activity, any dysfunctionality or deficient conditioning lead to manifestation of some disorder or pain.
Therefore, this paper focuses on determination of human motor system biomechanics functionality that is consisted of many subsystems. Synergistic coordination patterns of complex biomechanical human motor transmission system can be assumed, however, the coordination accuracy and activity timing of system elements has to be mastered. So, when all subsystems of human motor system are proportionally conditioned they achieve harmonious relations, thus mastering of skills and motor competence can be advanced without obvious risk of injuries. This strategy presumes that human motor system has its own functionality patterns that need to be understood and established.
METHODS
With respect to paper objective as functionality patterns of human motor or musculoskeletal system that need to be understood and established, synthesis will be employed to assist and validate findings. This approach will enable integration of accessible knowledge and research findings with the authors’ experience (biomechanical, biomedical engineering and product design; kinesiology scientist and professional coach), comprehension of human body biomechanics and patterns recognition.
STRUCTURAL COMPONENTS
Regarding the accessible knowledge and references, human motor system is considered to be mechanically presented as system of components that are interconnected as subassemblies.
Initially, human locomotor system is considered as mechanism that constitutes of skeletal (passive and stiff) and muscular (active and viscoelastic) subassembly. Recent comprehension expanded this system with fascial (or myofascial) subassembly. Initially introduced from architectural principle of tensional structural integrity – tensegrity, research has demonstrated that the architectural principles of tensegrity can be applied to biological organisms (termed biotensegrity). Utilizing these principles can demonstrate the mechanical structure-function relationship at all size scales in the human body[5]. In addition to this findings, human resting muscle tone (HRMT) was introduced[6] as the passive tonus or tension of skeletal muscle that derives from its intrinsic molecular viscoelastic properties, which exist in all creatures, not only humans. Hence, we suggest that resting muscle tone (RMT) seems to better describe the phenomenon. RMT is an intrinsic viscoelastic tension exhibited within the body’s kinematic chains. It functions inseparably from fascial (i.e. Myofascial) tissues and ligamentous structures.
It is important to observe that there is muscle tone even when a muscle is supposedly at rest, and that resting tension must be doing something, otherwise the body is wasting energy. Such tone is responsible for maintain neutral position of anatomical segments responsible for maintaining posture which needs to be controlled by central nervous system[7]. However, we disagree that in this state human electromyography (EMG) is silent since any level of muscular tone should be registered by EMG, which is the case even at low level of muscular activity. Since the fact that muscular and fascial tissue are inseparable and are merged into myofascial unit, resting muscle tone that corresponds to state where EMG is silent actually represent fascial tone that cannot be registered by EMG or other known apparatus in vivo.
Later research concluded that fascia is shaping element of the human body movement apparatus that comprises a multicellular three dimensional layer of connective tissue components (collagens, fibrocytes/-blasts, extracellular matrix), more specialized fibroblast-derived cells (fascia-, telocytes), contracting myofibroblasts, mechano- and propriosensors, and nociceptors. Fascia is a multicellular/multicomponent biological material for human body structural and functional integration as well as serving as a sensation organ in terms of movement and performance adjustment, body awareness and control[8-10].
Although initial idea of biotensegrity was valid regarding ability of human body to keep the posture with minimal muscular intervention, it seems more appropriate to use concept of fascintegrity[11]. Furthermore, after introduction of fascial components as biomechanical element, they have appeared to be considered as anatomical slings because of their properties. It would be also appropriate to concur with another synonym for this integration of muscle-fascia networks that is the neuromyofascial web. Therefore, we assume it would be correct that in this case to argue about that neuromyofascial resting tone (NMFRT) to replace the RMT. Thus, whatever the term we accept and utilize, most important is to revise our biomechanical comprehension of human motor system.
It is well known that with advancements in sports mastering, athletes tend to improve capability to relax muscles, as well as fascial structures. Examples from professional sport show that the top athletes tend to advance their NMFRT in order to achieve effective muscle tone easier and in shorter period of time.
Whatever term is the most appropriate (anatomical, functional or myofascial slings, or even neuromyofascial web – maybe just slings web), they are very important and necessary functional subsystem described and explained from various perspectives[8-12]. It is important to integrate such complex subsystem into analysis of locomotor functionality, but also in explorations of identified disorders and pain management. Unfortunately, most trials and experimental results available in literature deals with partial and very limited scope which also consider just planar and ideal conditions that are far from reality. Such findings cannot be used to determine or establish occupational and health recommendations, especially in order to prevent and manage injuries.
With regard to presented structural understanding, integration of these three main components into inseparable whole of mechanical representation of human locomotor system can be only complemented with the motor control system, which regulates necessary fine-tuned neuromuscular coordination. Thus, human locomotor (or musculoskeletal motor) system is made up of skeletal structures, muscles and fascias, regulated by motor control system, interconnected into functional whole.
MOTOR COMPONENTS
Human locomotor system is anatomically and biomechanically considered as to consist of inseparable segments, just in order to enable segmental functional participation understanding. As the main body segments are considered extremities, trunk and head, which are for analyses purposes often divided in subunits-segments. In functional or from mechanical point of view, pelvic girdle connect them all, and even more important, transmit energy and mechanical load during locomotor activities besides provided stabilization. It should be noted that the transmission of force and loads is present in other segments of the human body as well, so it is not solely the task of the pelvis girdle, however, its relative mobility to the legs sets her up as a support for the locomotor apparatus. The pelvic girdle and its complex role in musculoskeletal mechanics were explored[13], where integrated functional model of lumbopelvic-hip region has been introduced.
Critical appraisal of the literature about lumbar functional stability (instability) showed that although comprehensive analyses has been employed, consensus on effective prevention recommendations and disorders treatments has yet to be established[1]. Authors of this paper can concur with finding that lumbar region is integral part of lumbopelvic-hip region as well as element of functional neuromyofascial network[12]. It is shown that lumbopelvic-hip region is the inseparable from other surrounding body segments both functionally and structurally,
so the research and professional approaches need to employ such comprehension. Such approach can yield reliable answers of locomotor system coordination patterns and enable to properly define effective force and energy transmission through kinematic chains. To support transmission of energy and complex force vectors, pelvic girdle needs proper stabilization capability. After all, it is not without reason that athletes work very hard to strengthen the core.
Pelvic girdle functional capability is often represented by ability to assure desired level of transmission intensity (and connected with the term core) that needs to provide optimal stability while supporting the body movements. Core is considered to be inseparable complex of inner and outer unit, with their functional objectives respectively.
The inner unit muscles are tonic muscles which function is to effectively stabilise the spine and sacroiliac joint at low levels of contraction with low susceptibility to fatigue. It is recognized that well-timed coordination is critical for proper stabilisation. The ability of the inner unit muscles to contract prior to force production of phasic muscles (geared toward movement) is more important than their strength.
The outer (phasic) unit consists of four myofascial systems that generate movement and stabilise the body: deep longitudinal system, posterior oblique system, anterior oblique system and lateral system, very often represented and found named as myofascial slings. Regarding previously argued meaning of available terminology for myofascial sling[12], we also suggest to employ term neuromyofascial sling (NMFS) that more comprehensively describes their functional role.
Synergy of all motor components form vector of forces and force couples transmission as well as the necessary supports. However, in order to maximize specific synergy of neuromyofascial sling output in specific movement one has to deal with development of coordination structure that will assure that the direction of the vectors are not misaligned or broken. It would be appropriate to introduce example from high intensity sports activities and competition, where extremely precise and effective transmission of energy and forces into movement are required, which confirms previous statement. Similarly, such fast and impulsive coordination requires so that elements are performed with specific requirements. Such are direction of movement, amplitude, rhythmic characteristics, intensity etc., which is reflected in the rules/laws of training and improving movement in the theory of sports training[14, 15]. NMFSs activity exchange is ever-present throughout the entire motion scenario, but it is challenge to develop fine motor control that can be achieved only by special training. Thus, it can be stated that the core inner and outer unit function synergistically to stabilise the body that is required to create powerful and economic movement.
Effective functioning of the inner core unit leads toward stability of the spine and sacroiliac joints and the core provides reliable basis for the contraction the phasic muscles. This leads to the efficient use of limb strength, high movement economy and absence of injury[13, 16].
Core functionality and importance was systematically argued[17], where it is stated that weak conditioned trunk muscles, abdominals and imbalances between trunk muscles groups are not pathological, just a normal variation that will not lead to back pain directly, but will somewhat contribute to postural and functional deficiencies. Further on these findings, we need to argue and emphasize that when levels of muscles conditioning (low, high, weak, powerful, etc.) is considered we need to employ comprehensive and systematic attitude. This way we take into consideration final objective of the movement and the model that enables how it will be realized. Only in this case we can define adequate level of preparedness for specific muscle group, level of motoric coordination and other relevant parameters.
SPINAL ENGINE AND EFFECTIVE MOTOR SYSTEM
Explorations of spinal engine interconnection with the legs activity showed[18,19] that it is important functional motor parameter, where is vital to identify the behavioural pattern that leads toward controlled and effective motion. It is especially so when conditions for task completion are far from ideal or presumed, and postural challenge is also present. Although the most of the spinal engine functionality is rationally explained in the theory of spinal engine (and other consistent and complement research findings), there are still some new elements that should be explored. It is important though to mention that many stabilization interventions that should stabilize the spine artificially by reducing its spring like behaviour are counterproductive[18], except in short term utilization where spine stabilization contributes to injury prevention. Furthermore, merging cognitions about how the locomotor system performs that almost always comprises involvement of spinal functionality interrelated with pelvic girdle is essential. Anyhow, no human body part should be considered as passive or isolated, but the extent of participation may vary. Extremities also plays an important role in movements, however, cannot perform well without proper force vectors transmission and reliable, solid support.
DISCUSSION WITH CONCLUSIONS
Human locomotor system condition can be considered as to be at rest (relaxed) or tensed, and in state with or without locomotion.
The state of relaxed NFMSs and without locomotion can be used to analyse individual postural parameters, and can allow determining if there is some disturbances in neuromyofascial slings network imbalances. Such approach allows identification of relations and also variations in anatomical slings. Stiffness’s might vary from side to side, in anterior and posterior relations, as well as in diagonal that may be recognized from their anatomical trains – myofascial meridians[12].
Regarding tensed NFMSs state without locomotion that considers some level of muscular activity exists, and can be determined and monitored by EMG. In this case it is important to establish proper neuromyofascial slings coordination both in intensity and duration, for each active motor element up to whole chains, respectively. To be exact, each neuromyofascial sling is considered as motor chain as longitudinal line-up series of neuromyofascial subunits. Our perspective is aligned with findings[13] that muscles depicted within particular myofascial sling are connected via fascias to produce force vectors that assist in the transfer of load and movement energy. These muscles within a myofascial sling may overlap and interconnect with other slings depending on the change in force vectors needed for a competent dynamic movement.
Relaxed NFMSs with locomotion assume efficient utilization of synergistic principle, where antagonistic principle is used as the tension of working muscles alternates with the relaxation of muscles that are not involved in the movement. This principle enables optimal and effective transmissions of force and force couples vectors. A striking example can be the technical performance of athletes during the breaking of records. In literature such achievements can be found described as a lot of artistic expression of the athlete’s condition at these moments. As, for example, we can adduce descriptions of the ease of running, jumping, throwing (athletics), hang like a bird in the jump (basketball jumps), ease of movements (boxing) etc. For such a highly technical performance it is necessary to strictly utilize the laws of the training process – the principle of the training and development of movement and congruency in the development of condition and technical skill. This principle enables optimal and effective transmissions of force and force couples vectors.
Tensed NFMSs with locomotion assume that antagonistic principle is not completely achieved as the tension is present in working muscles as well at the muscles that need to be relaxed during the movement. In this case, synergistically generated muscle forces and their resultant vectors that are induced cannot be effectively transmitted in order to result in desired motion. Transmission efficiency can be reduced if some motor elements are not able to perform accordingly at optimal ratio for specific activity.
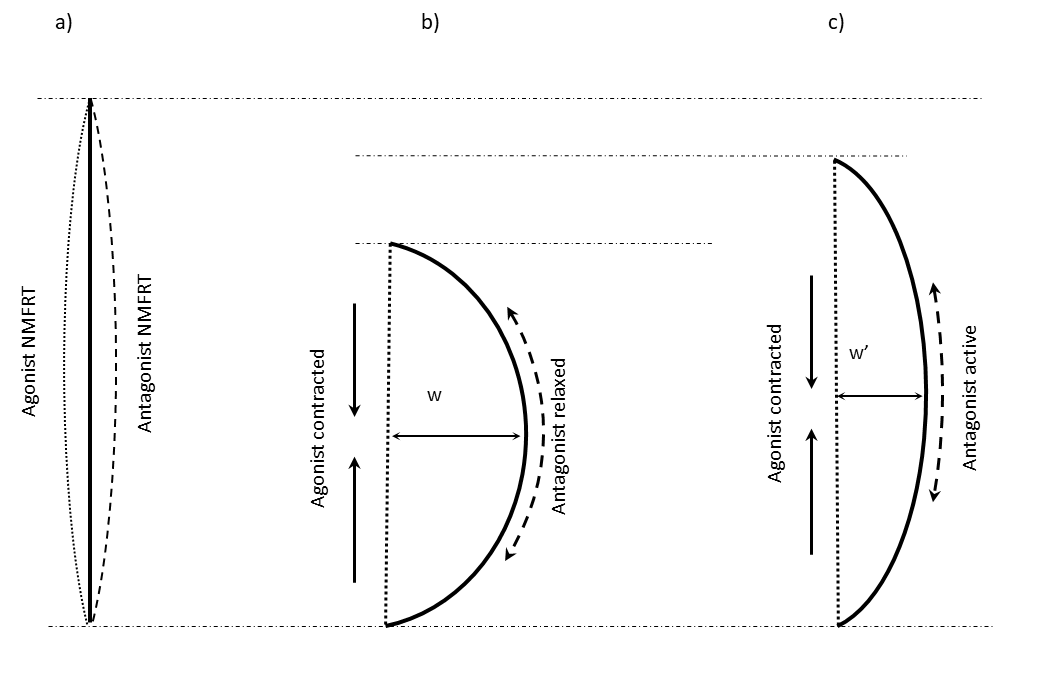
As example to discussed properties, we have used simple bow like behaviour of elastic rod (see Figure 1), designed so that antagonistic pair acts on him. From each opposing side is one viscoelastic unit that represents neuromyofascial sling (NMFS) that will interchange as agonist and antagonist. Figure 1a represents condition where both sides have NMFRT and potential energy is zero. Figure 1b represents condition that at agonist side contraction is present, so bow like rod flexes until it reaches potential energy level that is achieved at deflection w. Such level of potential energy is reachable only if antagonist side is stretched, yet relaxed. In Figure 1c one can observe absence of relaxation on antagonistic side with the same agonistic activity. This will consequently lead toward lesser net potential energy that can be generated due to reduced deflection w’, that will also cause reduced range of motion. This is the case when coordination is not efficient. Only more thorough analysis can answer the question what is the reason of this. Reasons can be either fatigue (central nervous system, lack of biomechanical components, excess lactic acid, etc.), or an insufficient level in the development of conditioning (strength, speed, endurance, etc.). Also, the reason may manifest as an imbalance in the development of the individual groups of muscles, motor qualities or even whole functional preparedness. We cannot help but recall the influence of the whole training method or individual elements of training methods. For example, optimal preload is a tonic for a basic motor skill. At the same time, excessive load negatively affects following activity. In this case, to what level should the deficiencies observed be adjusted (rectified, harmonized and proportioned) according to objective purpose and direction? As just discussed, another perspective of muscle and neuromyofascial tone (NMFT) consider the stiffness factor issues and motor elements capability, from perspective of stress-strain properties that are tonus related, as well as changeable and affected by discussed parameters.
Since neuromyofascial units consists (from perspective of mechanical properties) of muscle and fascial tissues, as inseparable neuromyofascial unit one or both can be responsible for such reduced ability to relax.
Efficacy deficiencies arises from lack of sufficient coordination in postural abilities, as well as core condition, viscoelastic properties of muscle-fascia (neuromyofascial) elements, both on individual motor unit scale up to the level of the whole neuromyofascial web. This puts important contribution to biomechanical locomotor system understandings of humans and any other living being that consider locomotor system as integral, yet complex biomechanical system. However, answer to question how to properly manage conditioning of human locomotor system according to this newly arisen acknowledgement is still open.
Authors of this paper support attitude[13] that when the force vectors are balanced in their relative contribution to the movement, they provide optimal position of the bones and joints throughout dynamic movement. In contrast, imbalanced force vectors resulting from altered tension in the myofascial slings can create malalignment and potentially contribute to loss of stability during static or dynamic tasks. Prior to comprehension of neuromyofascial slings and fascintegrity, as paradigm such slings were considered just as muscles interconnected in series with connective tissue in order to orientate muscle force vector disposition. From the neuromyofascial resting tone (NMFRT) and biotensegrity – fascintegrity meaning perspective, one can conclude that level of postural and functional tonus is considered as optimal, harmonious and balanced in sagittal, transversal and coronal perspectives.
Although the sagittal and coronal planes are often dominant by transmission intensity, transversal plane should not be excluded or ignored since all motor potentials arise from complex biomechanical activities. Furthermore, we think that such planar considerations are unfortunate and misaligned with essence of biomechanical locomotor system effectiveness. Thus, our opinion is that only three dimensional locomotor biomechanical understanding could lead toward optimal advances in motor capabilities (demonstrated at elite sports on the example of breaking records - human possibilities), prevention recommendations and therapy. This opinion is consistent with the conclusions of other researchers[12,13, 18]. Furthermore, we concluded that neuromyofascial biomechanical properties are important factor because it reflects ability of force vector generating time dependent capability, stress-strain curve and NMFRT.
Hence, it is important to differentiate NMFRT from NMFT. Authors identify NMFRT as individual level for passive postural poses as the initial neuromyofascial tone. It is the tone that is present on healthy subjects at wakeup. To define the NMFT, authors consider as any other level of neuromyofascial tone that is variable. Challenge is therefore to estimate optimal NMFT. Reason for estimation of optimal NMFT can be justified by the fact that different NMFT than optimal will compromise optimal motion. Thus, inadequate NMFT will cause other locomotor adaptations, compensations and compromises, which reflect the effectiveness of the learning process by movement in whole. This finding is very important from ergonomic perspective since it will reflects in effectiveness of the learning, training and preparation processes in sports and occupational practice. This is also valid for other fascial subassembly components, since they are the inseparable part of the same integral neuromyofascial network.
Proper estimation of properties and harmonization of all motor elements authors of this paper assumes as essential. Most strains, ruptures and similar injuries are related with inappropriate properties of viscoelastic functional motor elements, due to changes and conditions in which inharmoniousness occur. This is a highly present occurrence in sports and other high intensity and complex activities, especially when sore muscles change their properties, and their tendons should compensate lack of muscular extensibility.
Regarding perspective regarding stiffness properties, alteration of myofascial motor elements properties consider partially reduced extensibility of viscoelastic sling, especially if this is unilaterally present. This would be also the case if some tone persists in slings, so they are disabled to reach their NMFRT.
For restoration of locomotor capabilities due to acute and chronic injury conditions, we think that proper therapy should take into account the locomotor capabilities prior to occurrence of deficient condition, and to define dysfunctional subsystem. Of course, this opinion is valid in case of accident or incident consequences that are not caused by motor deficiency which could have been prevented. This is important not only from perspective of elite athletes, but is important for everyone since locomotor harmony should be achieved globally – for the entire locomotor system. Our opinion and recommendation ascend from the fact that complex locomotor biomechanical system or neuromyofascial network should always be at appropriate level of harmony. This level can be maintained or advanced by proper, yet harmonized treatment, not isolated to some narrow area of acute necessity.
From mechanical point of view in general, including biomechanical perspectives, holistically established harmony should comprise of multidirectional neuromyofascial components balance. That involves harmony achieved of acting motor forces and force couples, stiffness as well as viscoelastic properties paired. Balanced relations should manifest and be achieved in all relations (flexion-extension, bending, shear, longitudinal, oppositional, diagonal and torsional harmony).
Even simple locomotor activity involves appropriate coordination of complete locomotor system. To discuss effects of appropriate coordination and synergy on movement, we will employ example of plain upright trunk rotation around vertical axis, as torsional movement (see Figure 2). During this movement we will exclude extremities and their participation and will focus only on trunk slings components. Although we strongly encourage and support holistic analyses, despite to the use of the isolated body part, this example presents how slings acts as coordinated system, nevertheless depend on properties, capabilities and compatibility.
Though all neuromyofascial slings are assumed to be involved in this activity, at least passively, we will focus and observe just anterior and posterior trunk oblique slings.
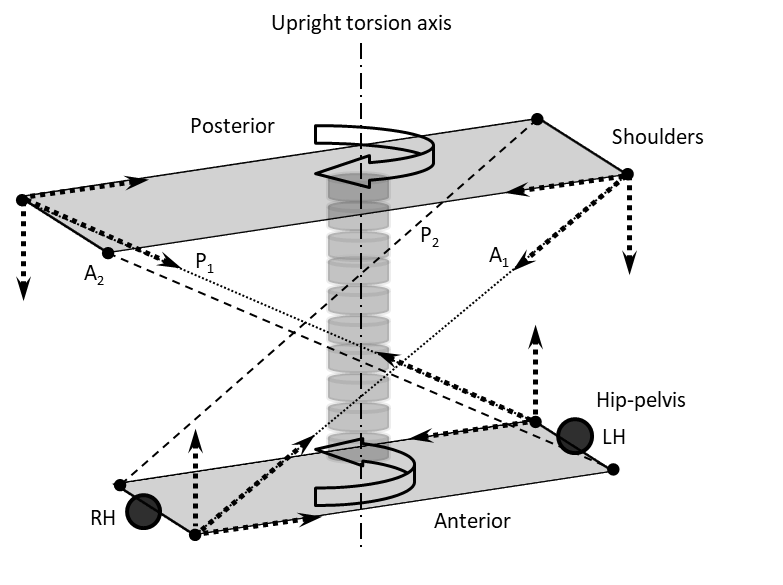
represents simplified model that illustrate oblique slings vectors and their activity patterns, with respect to functional structure. Activated anterior oblique sling 1 (A1) and posterior oblique sling 1 (P1) at the same time will generate torsion spring like effect, so they need to work as pair in order to maintain posture and generate trunk rotation. During their activation horizontal and vertical components of their oblique vector forces have been generated. Horizontal components are making force couples at transversal shoulder and hip-pelvis planes, while their vertical components create compressive force on spinal segments and at the same time stabilize motion to remain just around the vertical torsional axis. At that time it is obvious that passive anterior oblique sling 2 (A2) and posterior oblique sling 2 (P2) are stretched and accumulate energy to restore trunk into neutral position, or to maintain alternation of torsional movement by active engagement. Taking into consideration mechanical properties and condition of slings from Figure 1 related discussion, we can conclude that only harmoniously conditioned locomotor system can perform well and without susceptibility to injury. Moreover, in cases where inappropriate force relations are present, especially vertical components that are unable to keep hip-pelvis area (or pelvic girdle) at optimal position, it is obvious that optimal transmission of force vectors is not to be expected.
In conclusion, since the complexity of human biomechanics and diversity of approaches can be identified, we need to get to the bigger perspective of the identified specific objective, as well as conclusions that comprehend all that matters. Such comprehension can be used for revision of currently utilized recommendations, standards and principles. Authors are inclined to consider the physiological processes in the single movement holistically, utilizing a comprehensive analysis. Such approach considers acknowledged interrelations in order to obtain systematic functionality patterns.
With accordance of integration of main components into inseparable whole of mechanical representation of human locomotor system can be only complemented with the motor control system, which regulates necessary fine-tuned neuromuscular coordination.
Necessity for NMFT determination level can be justified by objective which reflects the process of the learning or medical treatment process by movement in whole. This way we can obtain effectiveness of the learning, training and preparation processes in sports and occupational practice, which is in compliance with ergonomic criterions. The authors determined that for the correct analysis of the human locomotor system, it is necessary to consider neuromyofascial slings (NMFS) system in the following states: relaxed or tensed with or without locomotion.
Hence, adequate and proportional conditioning of all active system motor elements and subsystems that proves to be holistically harmonized is the key demand of an efficient motor system.